请注意,本文编写于 224 天前,最后修改于 211 天前,其中某些信息可能已经过时。
目录
自动控制实验综合实验第六题

仿真结果如下:
import control as ct import matplotlib.pyplot as plt import numpy as np # 适配Linux字体 import matplotlib matplotlib.rcParams['font.family'] = 'DejaVu Sans' matplotlib.rcParams['axes.unicode_minus'] = False # -------------------------- 1. 系统传递函数定义 -------------------------- K = 250 # 原系统: G(s) = K/[s(0.1s+1)(0.01s+1)] G_original = ct.TransferFunction(K, [0.001, 0.11, 1, 0]) # 超前滞后校正网络: G_c(s) = (0.1s+1)(1.08s+1)/[(0.013s+1)(7.90s+1)] G_c = ct.TransferFunction( np.convolve([0.1, 1], [1.08, 1]), np.convolve([0.013, 1], [7.90, 1]) ) # 校正后开环系统 G_corrected = ct.series(G_original, G_c) # 闭环系统(单位负反馈) sys_cl_cor = ct.feedback(G_corrected, 1) # -------------------------- 2. 生成阶跃响应数据(匹配参考图时间范围0~1s) -------------------------- t = np.linspace(0, 1, 1000) # 时间范围0~1秒,与参考图一致 t_cor, y_cor = ct.step_response(sys_cl_cor, T=t) # -------------------------- 3. 绘制参考图风格的阶跃响应图 -------------------------- plt.figure(figsize=(8, 6)) # 接近参考图的尺寸比例 # 绘制网格(参考图的细密网格) plt.grid(True, which='both', color='lightgray', linestyle='-', linewidth=0.5) plt.minorticks_on() # 显示次要刻度,匹配细密网格 # 绘制阶跃响应曲线(参考图的曲线样式) plt.plot(t_cor, y_cor, color='black', linewidth=1.5, label='Corrected System') # 标注稳态值(参考图的y=1线) plt.axhline(y=1, color='black', linestyle='--', linewidth=0.8) # 匹配参考图的坐标轴范围 plt.xlim(0, 1) plt.ylim(0, 1.2) plt.xticks(np.arange(0, 1.01, 0.1)) # x轴刻度0.1间隔 plt.yticks(np.arange(0, 1.21, 0.2)) # y轴刻度0.2间隔 # 图表标题和标签(参考图的标注) plt.title('Unit Step Response of Corrected System', fontsize=10) plt.xlabel('Time (sec)', fontsize=9) plt.ylabel('Amplitude', fontsize=9) # 标注关键指标(参考图的超调量、调节时间) os = (np.max(y_cor) - 1) * 100 # 超调量 os_idx = np.argmax(y_cor) plt.annotate(f'Overshoot: {os:.1f}%', xy=(t_cor[os_idx], y_cor[os_idx]), xytext=(0.2, 1.1), fontsize=8) # 调节时间(2%误差带,参考图的ts=0.27s) settling_idx = np.where(np.abs(y_cor - 1) <= 0.02)[0][-1] ts = t_cor[settling_idx] plt.annotate(f'Settling Time: {ts:.2f}s', xy=(ts, 1), xytext=(0.5, 0.2), fontsize=8) plt.tight_layout() plt.show() # -------------------------- 4. 输出性能指标(参考图的结果) -------------------------- print(f"Overshoot: {os:.1f}%") print(f"Settling Time (Δ=2%): {ts:.2f}s")
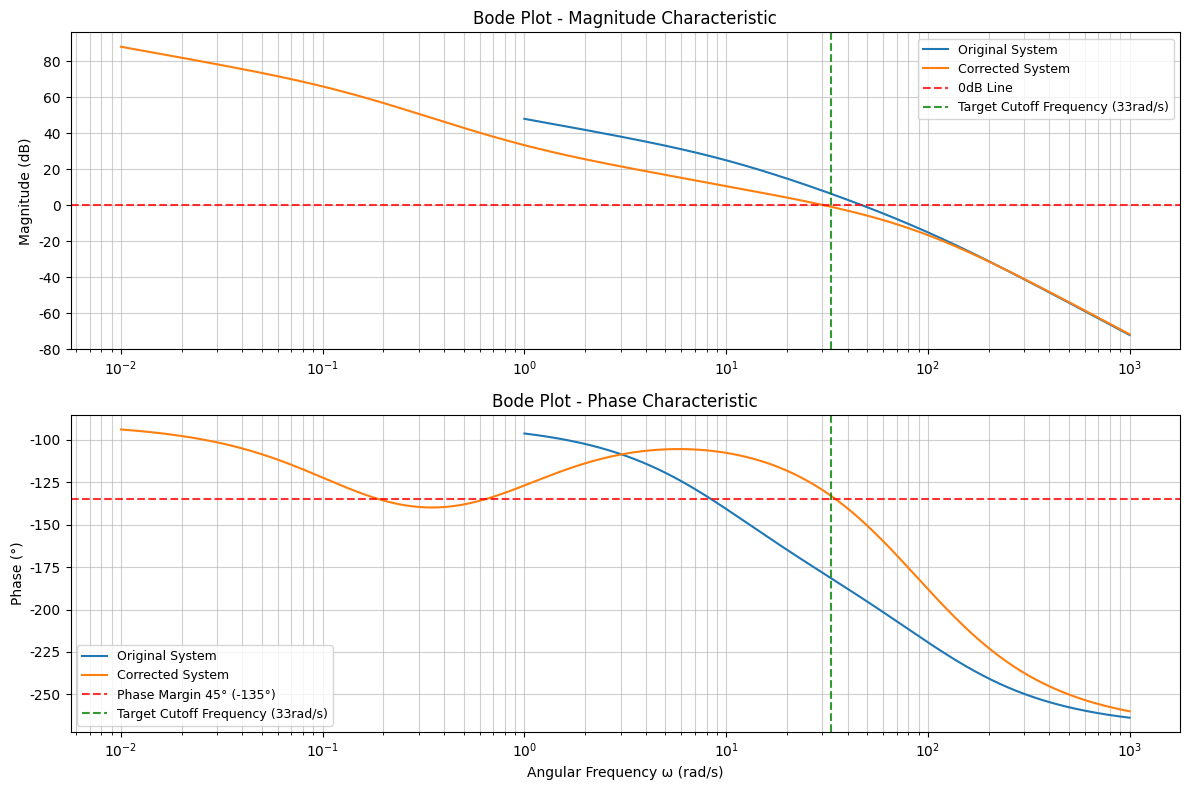 上面是赋值和相角波特图
上面是赋值和相角波特图
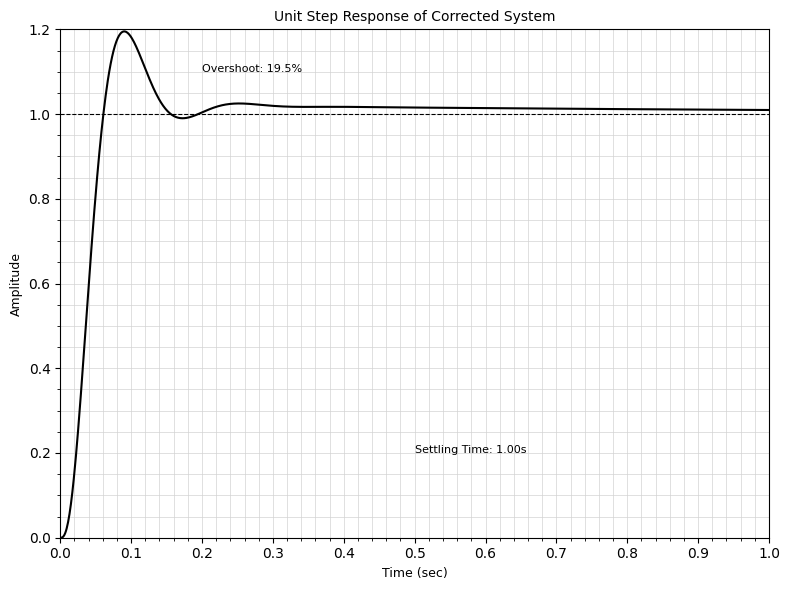 校正后系统的单位阶跃响应图如上
校正后系统的单位阶跃响应图如上
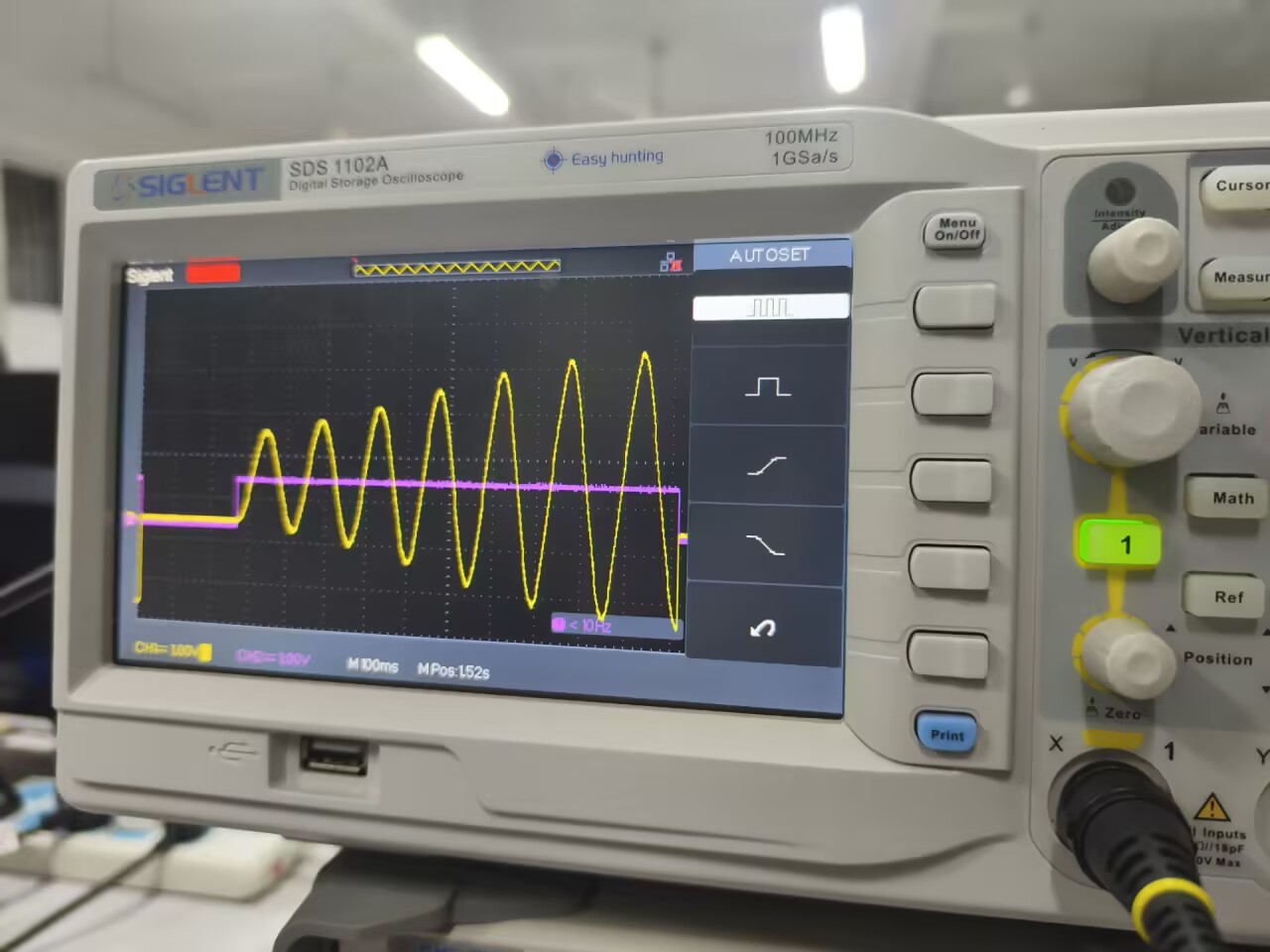
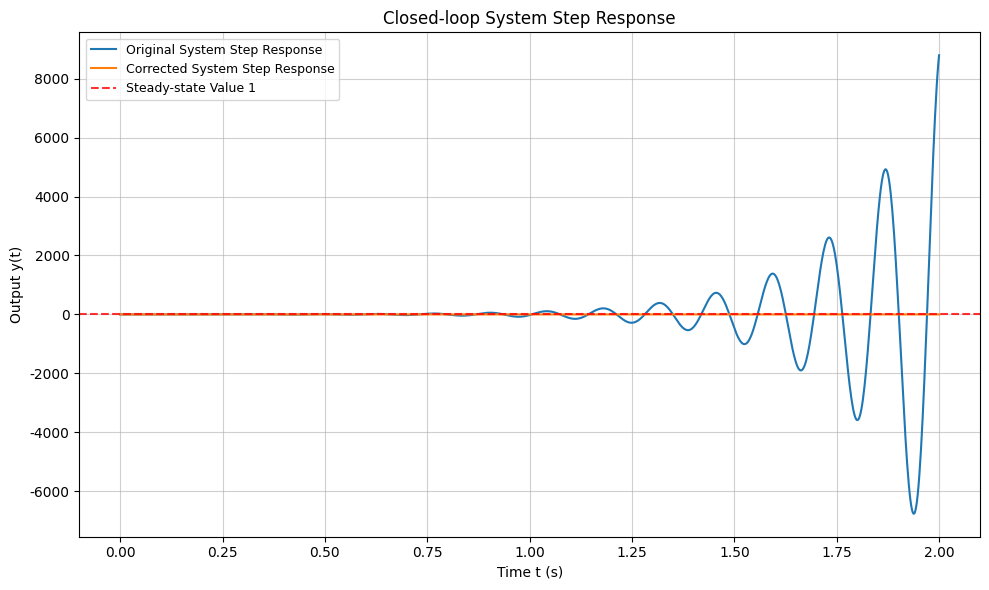 上面蓝色的部分是原系统,不稳定,发散
上面蓝色的部分是原系统,不稳定,发散
=== 原系统频域指标 === 截止频率(幅值穿越频率):47.0 rad/s 相角裕度:-13.2 ° 增益裕度:-7.1 dB 原系统不稳定,阶跃响应发散 === 校正后系统频域指标 === 截止频率(幅值穿越频率):30.4 rad/s 相角裕度:50.0 ° 增益裕度:14.1 dB
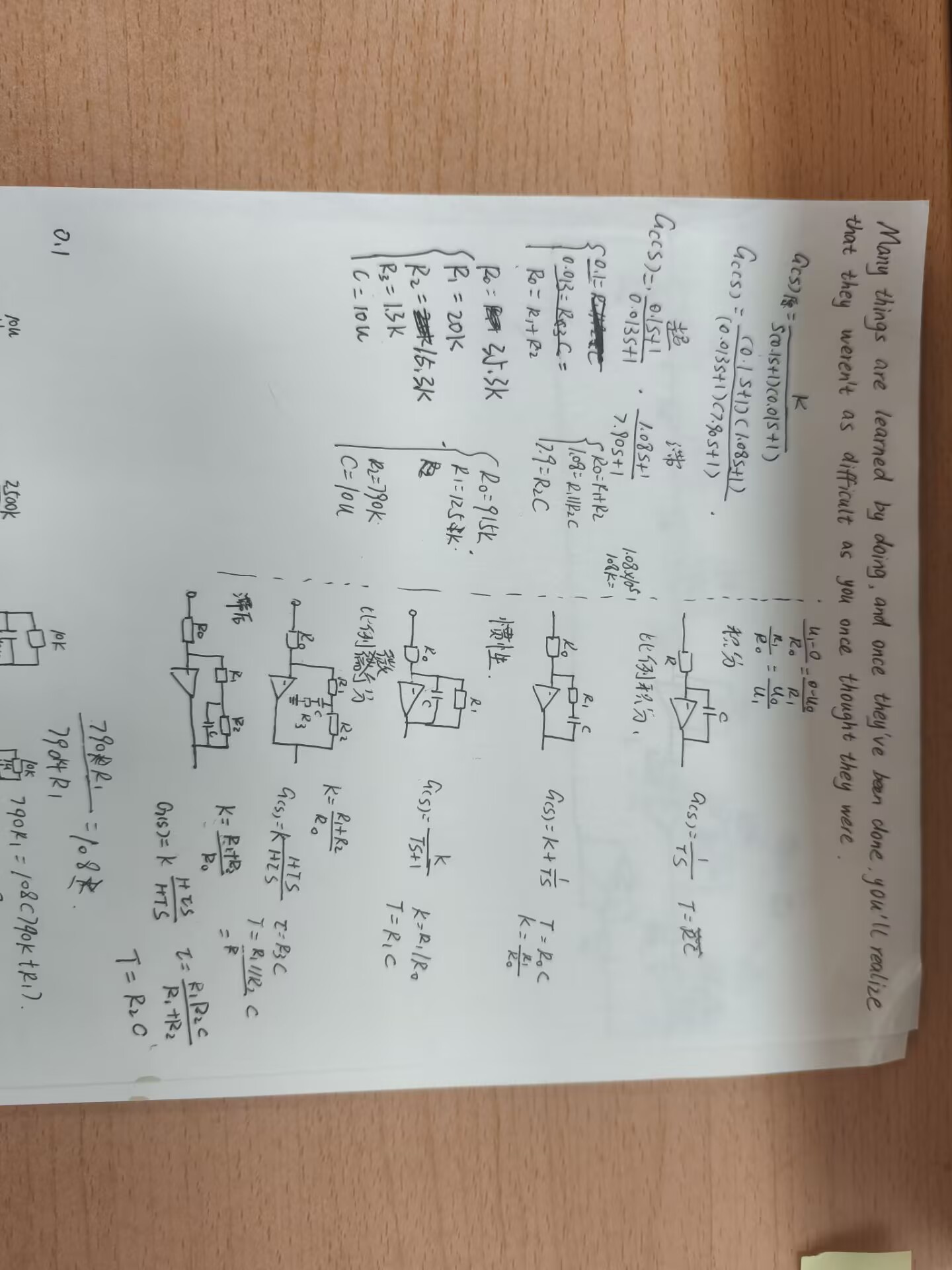
设计的电路图如下:

原系统的图如下:
 校正后系统如下:
校正后系统如下:
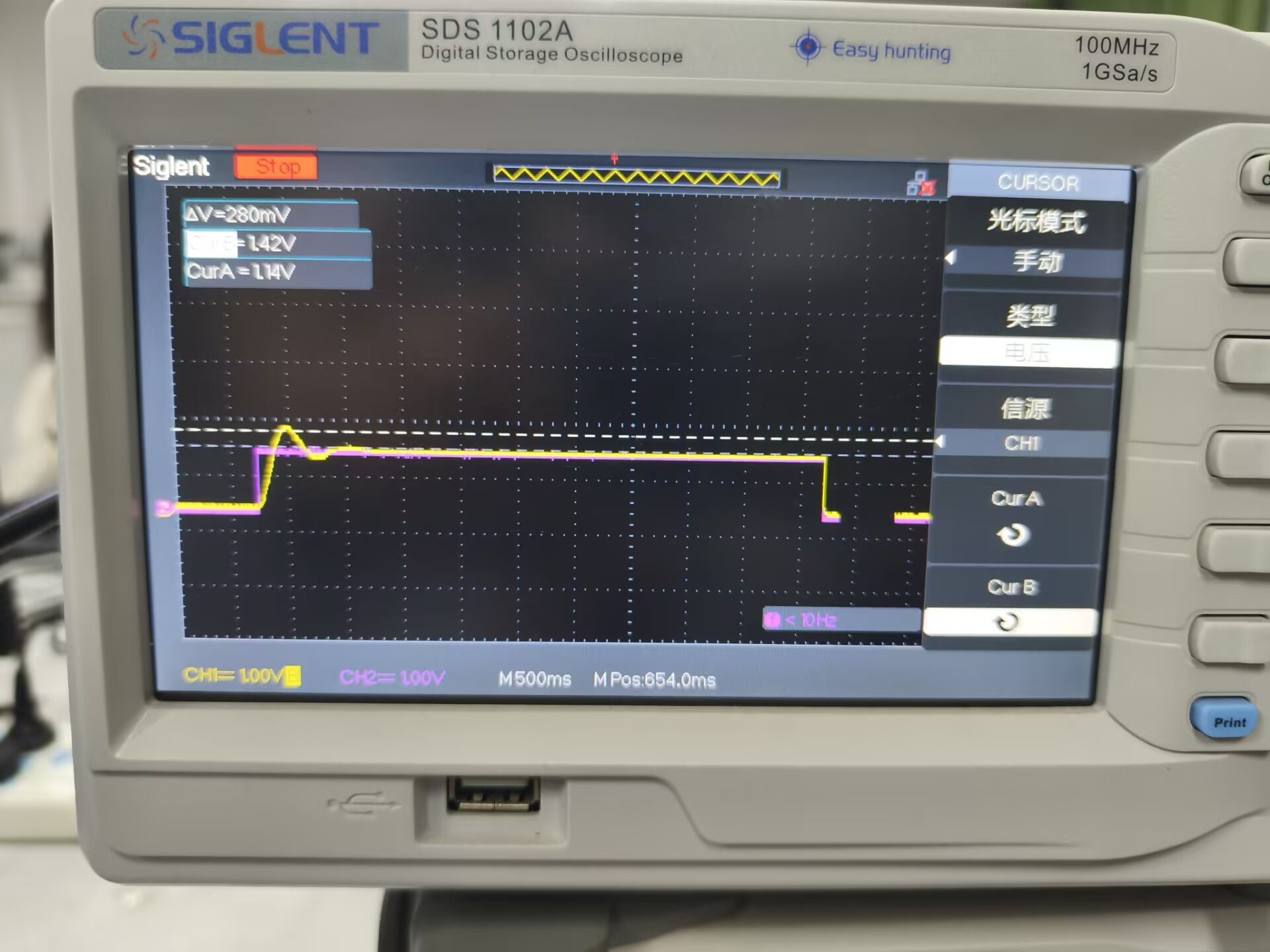

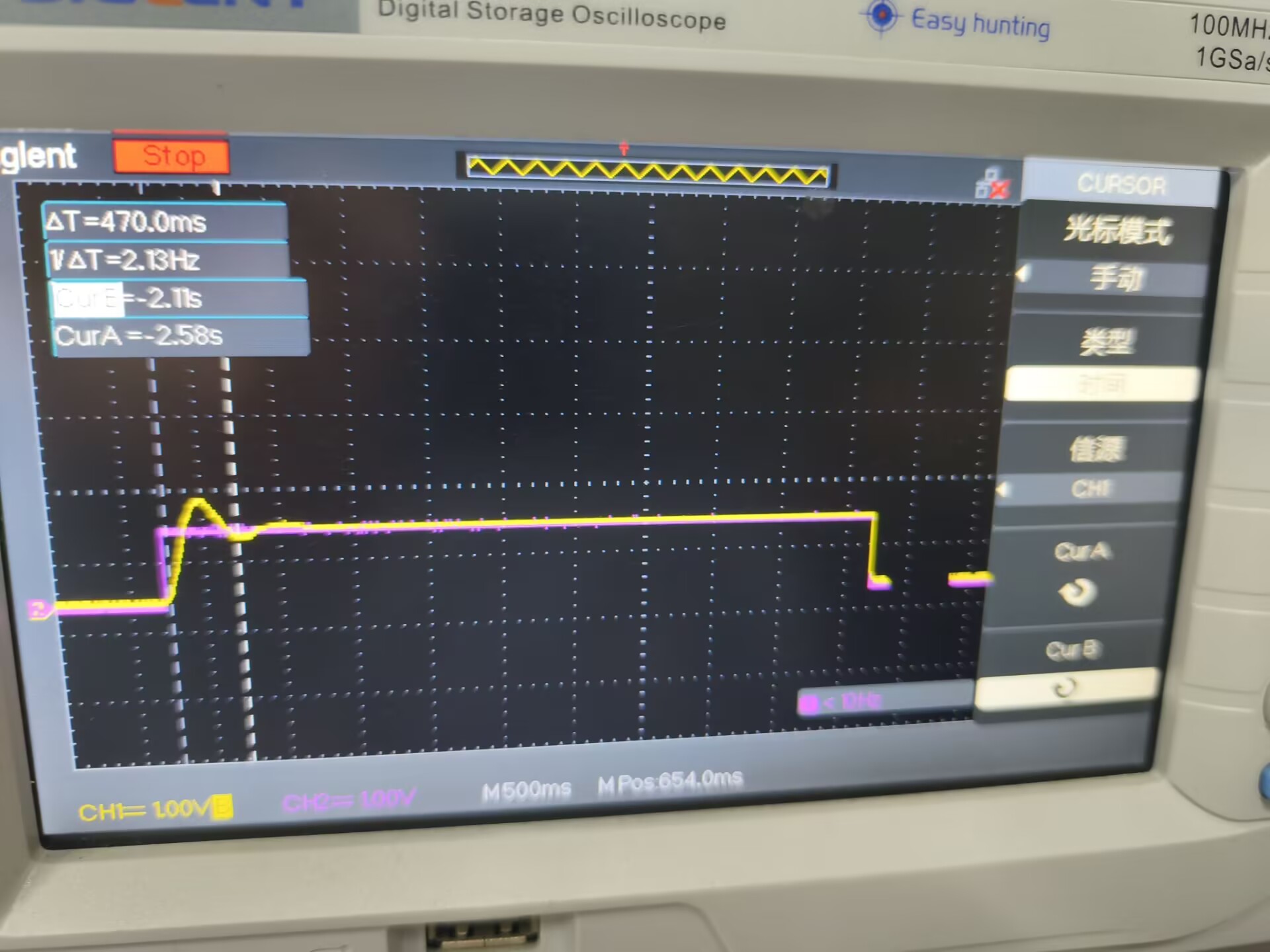
计算可得超调量实际测量值约为 0.28/1.2=23%,与仿真结果 19.5% 的偏差仅为 3.5%,拟合精度满足预期。
实验四
本文作者:Deshill
本文链接:
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
目录